归纳总结-梯度消失和梯度爆炸
本篇文章我们主要来探讨一下深度网络中为什么会出现梯度消失和梯度爆炸的问题,以及该如何解决这种问题。梯度消失或者梯度爆炸产生的主要原因是因为复合函数求导过程中,每一层都产生了连乘的作用,深度太深的话, $0.9^{100}$ 趋于0,称为梯度消失, $1.1^{100}$趋于无穷大导致梯度爆炸。
本篇文章我们主要来探讨一下深度网络中为什么会出现梯度消失和梯度爆炸的问题,以及该如何解决这种问题。梯度消失或者梯度爆炸产生的主要原因是因为复合函数求导过程中,每一层都产生了连乘的作用,深度太深的话, $0.9^{100}$ 趋于0,称为梯度消失, $1.1^{100}$趋于无穷大导致梯度爆炸。
阿里的部分笔试题总结。
如何在python中调用c++语言实现的类或者库,有多种方式,个人觉得swig比较方便,这里介绍一下swig如何安装。
我发现教程中只给了pong的cpp代码,所以为了更好的理解rviz的操作方式,我又写了一个python版本的pong代码。
这篇文章将分析一下该代码。
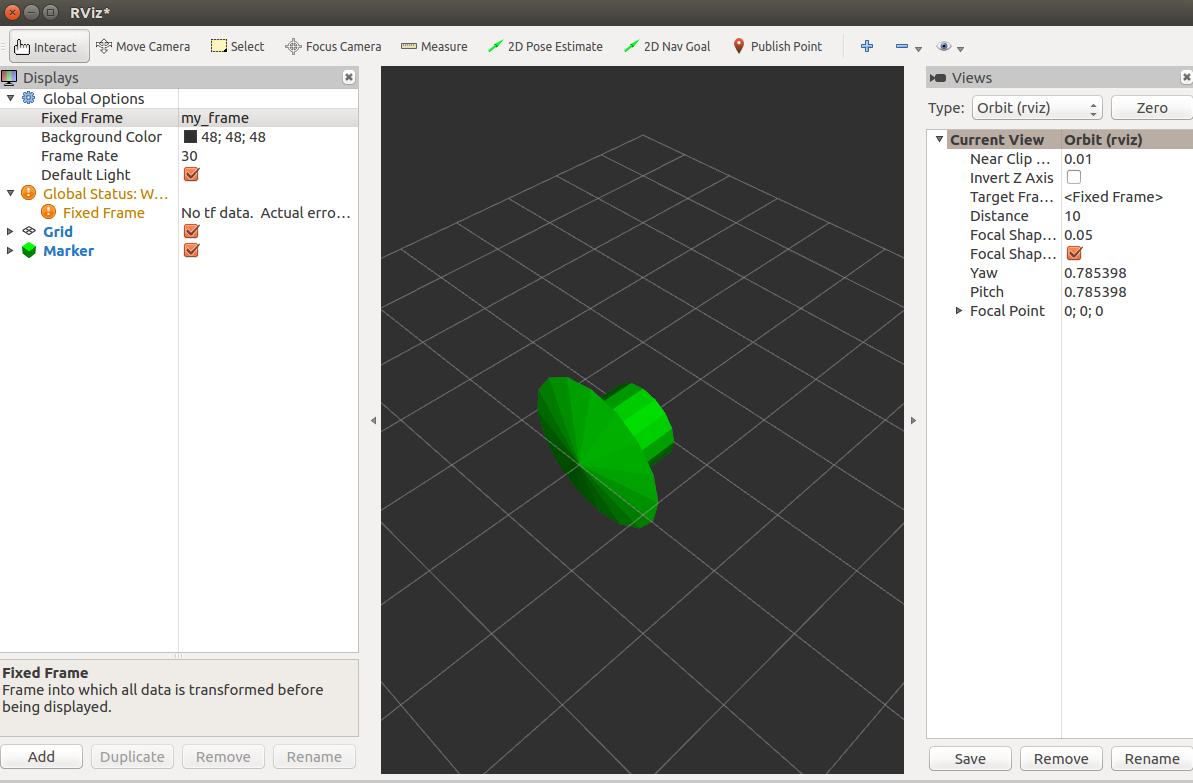
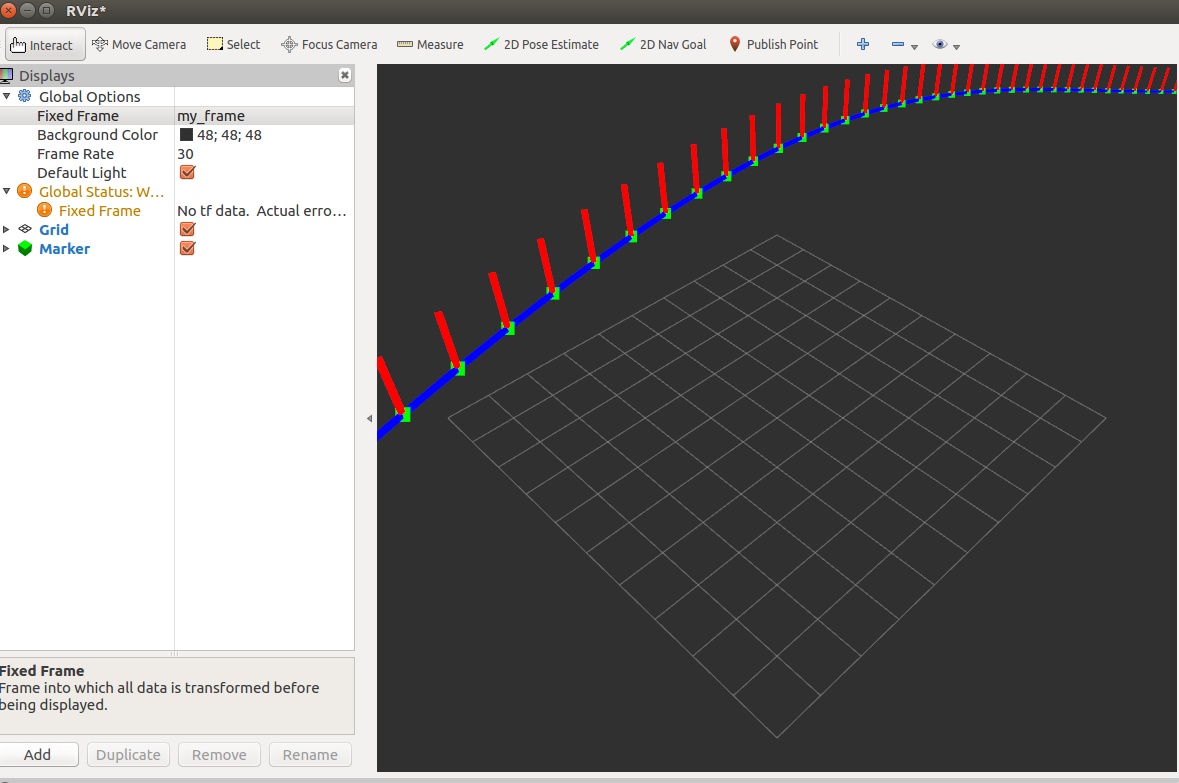
这篇文章将展示如何传递基本的形状消息给rviz,并展示。
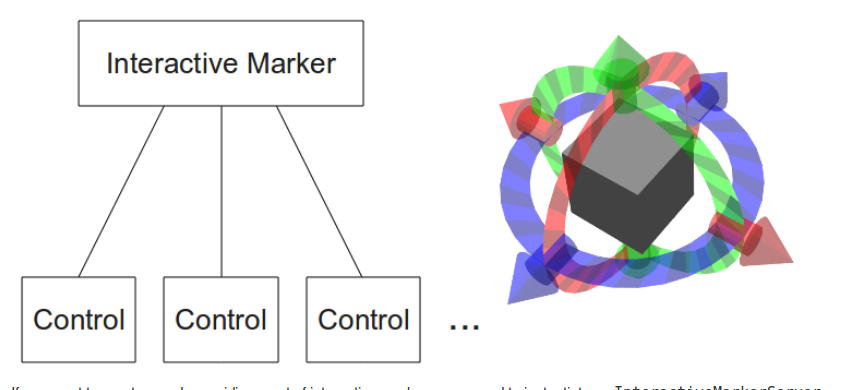
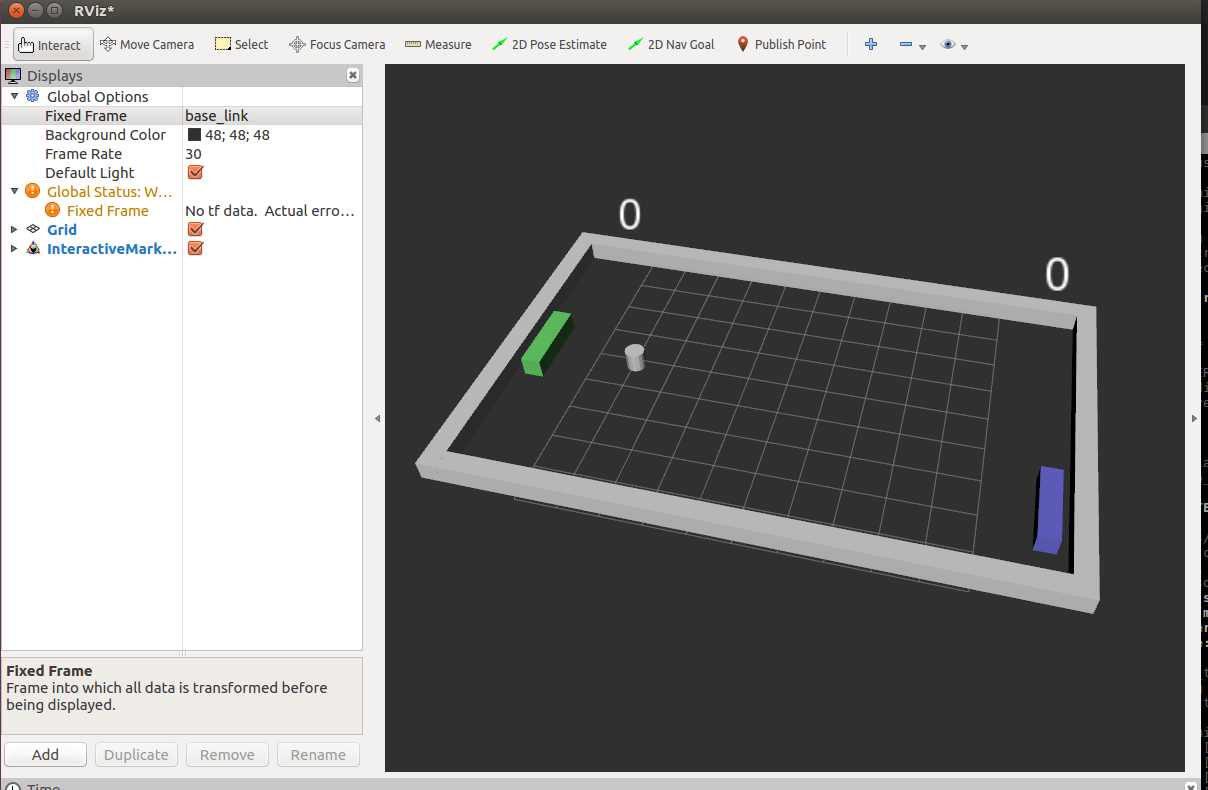
interactive markers和markers相似,但是它允许用户的交互,所以包含一些控制需要的参数,比如运动类型等。