1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
| import time
import visdom
import matplotlib
import torch as t
import numpy as np
matplotlib.use("Agg")
from matplotlib import pyplot as plt
def vis_image(img, ax=None):
"""Visualize a color image
img: RGB format with values between [0, 255], 3 x H x W, array
ax: matplotlib.axes.Axis, where to display the img
return: returns the Axes object with the plot for further tweaking
"""
if ax is None:
fig = plt.figure()
ax = fig.add_subplot(1, 1, 1)
img = img.transpose((1, 2, 0))
ax.imshow(img.astype(np.uint8))
return ax
def vis_bbox(img, bbox, label=None, score=None, gt=False, ax=None):
"""Visualize bounding boxes inside image.
"""
if label is not None and not len(bbox) == len(label):
raise ValueError('The length of label must be same as that of bbox')
if score is not None and not len(bbox) == len(score):
raise ValueError('The length of score must be same as that of bbox')
ax = vis_image(img, ax=ax)
if len(bbox) == 0:
return ax
if gt:
n = int(len(bbox)/2)
else:
n = len(bbox)
for i, bb in enumerate(bbox):
if i<n:
color = 'blue'
else:
color = 'red'
xy = (bb[1], bb[0])
height = bb[2] - bb[0]
width = bb[3] - bb[1]
ax.add_patch(plot.Rectangle(
xy, width, height, fill=False, edgecolor=color, linewidth=2))
caption = list()
if label is not None:
lb = label[i]
caption.append(str(lb).zfill(3))
if score is not None:
sc = score[i]
caption.append('{:.2f}'.format(sc))
if len(caption) > 0:
ax.text(bb[1], bb[0],
': '.join(caption),
style='italic',
bbox={'facecolor': 'white', 'alpha': 0.5, 'pad': 0})
return ax
def fig2data(fig):
"""
brief Convert a Matplotlib figure to a 4D numpy array with RGBA
channels and return it
@param fig: a matplotlib figure
@return a numpy 3D array of RGBA values
"""
fig.canvas.draw()
w, h = fig.canvas.get_width_height()
buf = np.fromstring(fig.canvas.tostring_argb(), dtype=np.uint8)
buf.shape = (w, h, 4)
buf = np.roll(buf, 3, axis=2)
return buf.reshape(h, w, 4)
def fig4vis(fig):
"""
convert figure to ndarray
"""
ax = fig.get_figure()
img_data = fig2data(ax).astype(np.int32)
plot.close()
return img_data[:, :, :3].transpose((2, 0, 1)) / 255.
def visdom_bbox(*args, **kwargs):
fig = vis_bbox(*args, **kwargs)
data = fig4vis(fig)
return data
class Visualizer(object):
"""
wrapper for visdom
you can still access naive visdom function by
self.line, self.scater,self._send,etc.
due to the implementation of `__getattr__`
"""
def __init__(self, env='default', **kwargs):
self.vis = visdom.Visdom(env=env, use_incoming_socket=False, **kwargs)
self._vis_kw = kwargs
self.index = {}
self.log_text = ''
def reinit(self, env='default', **kwargs):
"""
change the config of visdom
"""
self.vis = visdom.Visdom(env=env, **kwargs)
return self
def plot(self, name, y, showlegend=False, **kwargs):
""" plot line
name: the name of variable
y: the current value of variable
showlenged: whether show variable's lengend
Example:
self.plot('loss',1.00)
"""
x = self.index.get(name, 0)
self.vis.line(Y=np.array([y]), X=np.array([x]),
win=name,
opts=dict(title=name, showlegend=showlegend),
update=None if x == 0 else 'append',
**kwargs
)
self.index[name] = x + 1
def plot_many(self, d):
"""
plot multi values
@params d: dict (name,value) i.e. ('loss',0.11)
"""
for k, v in d.items():
if v is not None:
self.plot(k, v)
def img(self, name, img_, **kwargs):
"""
self.img('input_img',t.Tensor(64,64))
self.img('input_imgs',t.Tensor(3,64,64))
self.img('input_imgs',t.Tensor(100,1,64,64)) 100张灰度图像
self.img('input_imgs',t.Tensor(100,3,64,64),nrows=10)
!!don't ~~self.img('input_imgs',t.Tensor(100,64,64),nrows=10)~~!!
"""
self.vis.images(t.Tensor(img_).cpu().numpy(),
win=name,
opts=dict(title=name),
**kwargs
)
def img_many(self, d):
for k, v in d.items():
self.img(k, v)
def log(self, info, win='log_text'):
"""
self.log({'loss':1,'lr':0.0001})
"""
self.log_text += ('[{time}] {info} <br>'.format(
time=time.strftime('%m%d_%H%M%S'), \
info=info))
self.vis.text(self.log_text, win)
def __getattr__(self, name):
return getattr(self.vis, name)
def state_dict(self):
return {
'index': self.index,
'vis_kw': self._vis_kw,
'log_text': self.log_text,
'env': self.vis.env
}
def image_bbox(self, name, image, bbox, label=None, score=None, gt=False, ax=None):
img_data = visdom_bbox(image, bbox, label=label, score=score, gt=gt)
self.img(name, img_data)
def load_state_dict(self, d):
self.vis = visdom.Visdom(env=d.get('env', self.vis.env), **(self.d.get('vis_kw')))
self.log_text = d.get('log_text', '')
self.index = d.get('index', dict())
return self
def img_heatmap(self, name, X):
"""heatmaps
X: H x W, array
"""
self.vis.heatmap(X, win=name)
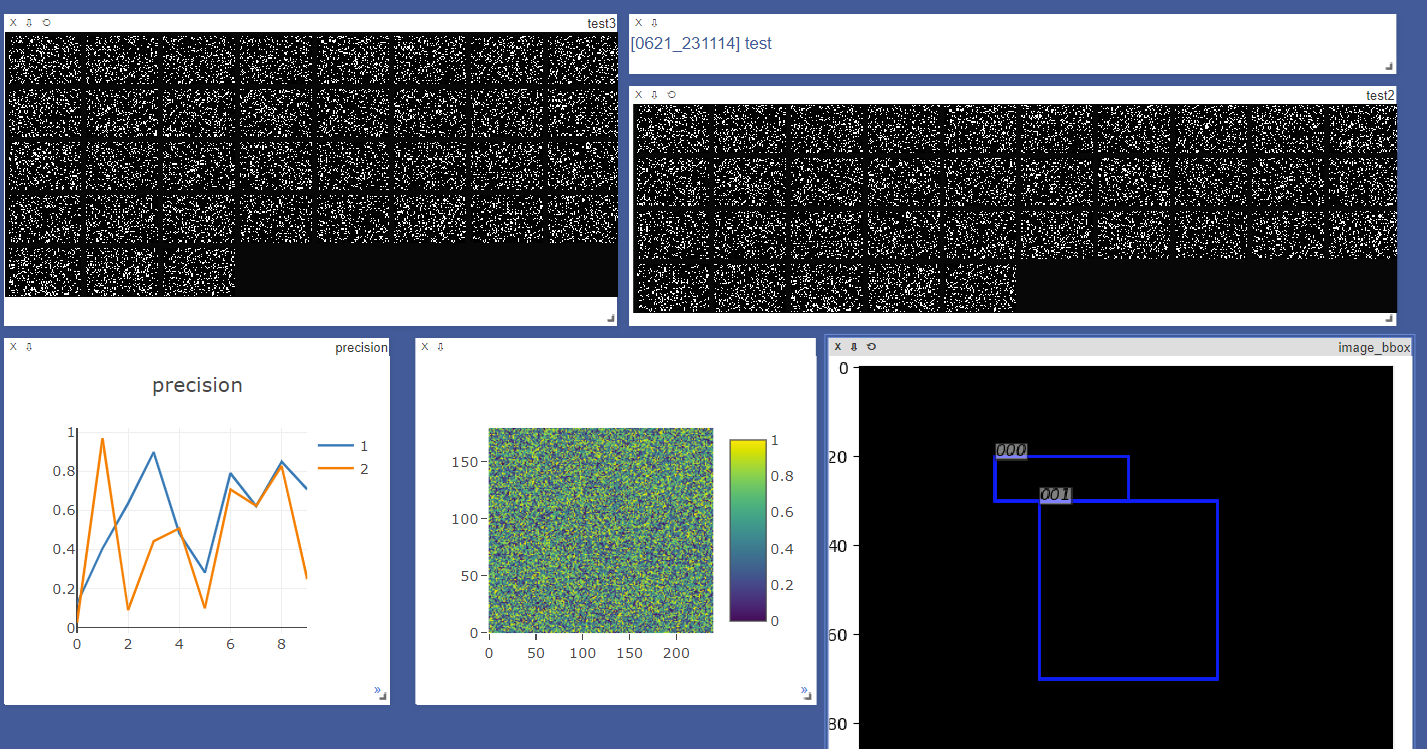
if __name__ == '__main__':
vis = Visualizer()
import torch
img = torch.randn(35, 1, 40, 60)
print(torch.max(img[0]))
vis.img('test3', img)
vis.img('test2', img, nrow=10)
vis.log('test', win='test')
import numpy as np
img = np.random.rand(3,100, 120)
bbox = np.array([[20, 30, 30, 60], [30, 40, 70, 80]])
label = np.array([0, 1])
vis.image_bbox('image_bbox', img, bbox, label=label)
vis.img_heatmap('heatmap', np.random.rand(180, 240))
p0_1 = np.random.rand(10)
p0_2 = np.random.rand(10)
for i in range(10):
vis.plot('precision', [p0_1[i], p0_2[i]], showlegend=True)
|