工具使用-pycharm+github push/pull/branch/merge操作
一直记不住使用git上传下载github代码的指令,不过幸好现在使用pycharm管理项目代码,pycharm对guihub的版本控制我觉得还是挺适合我的。所以这里记录下如何使用pycharm + github进行项目的版本控制。
一直记不住使用git上传下载github代码的指令,不过幸好现在使用pycharm管理项目代码,pycharm对guihub的版本控制我觉得还是挺适合我的。所以这里记录下如何使用pycharm + github进行项目的版本控制。
本文第一次提出利用深度网络端到端的实现多目标跟踪。
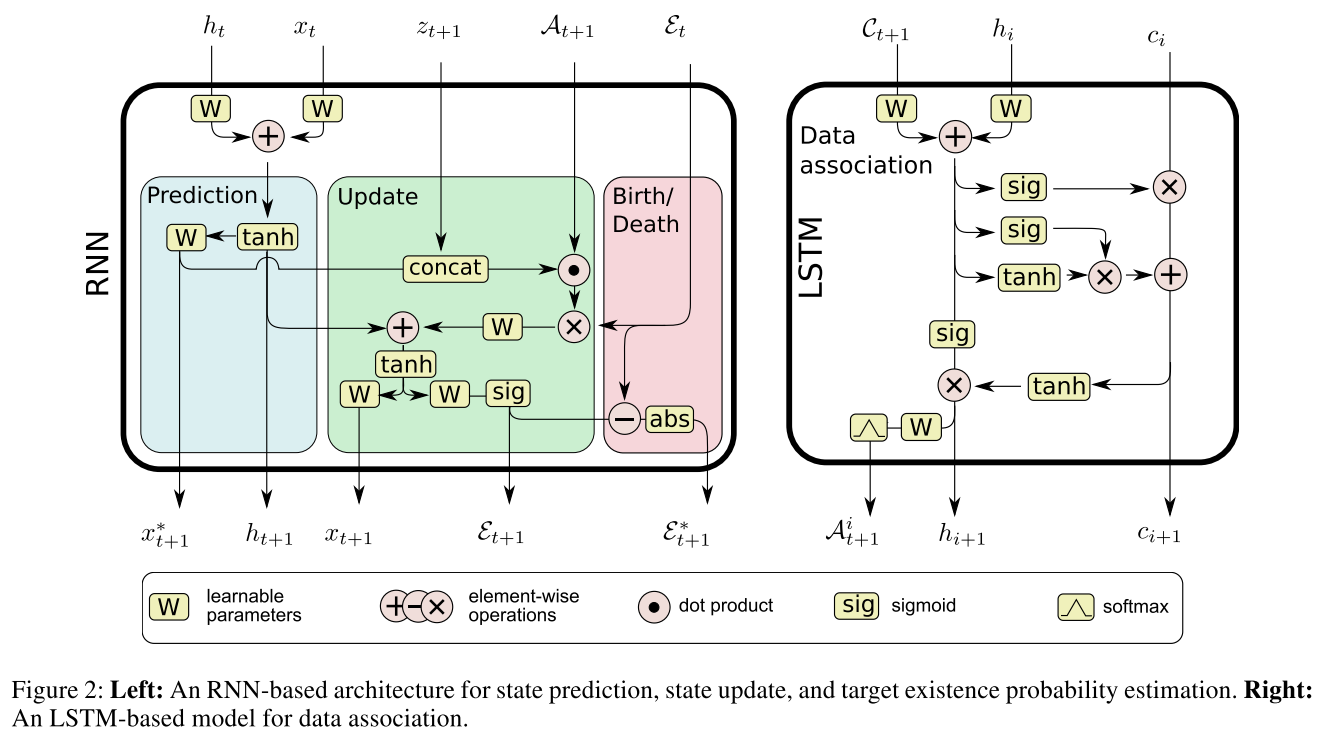
真实环境中处理多目标跟踪任务具有一些难点。首先轨迹的个数不定,轨迹的起点和重点不定; 其次轨迹中目标的状态是连续变量,比如位置,尺寸,置信度等,最后一般解决多目标跟踪任务最终转化为组合优化问题,而组合优化问题是离散空间求解问题。
这篇文章和之前的两篇笔记一样,都是利用网络去解决数据关联问题。
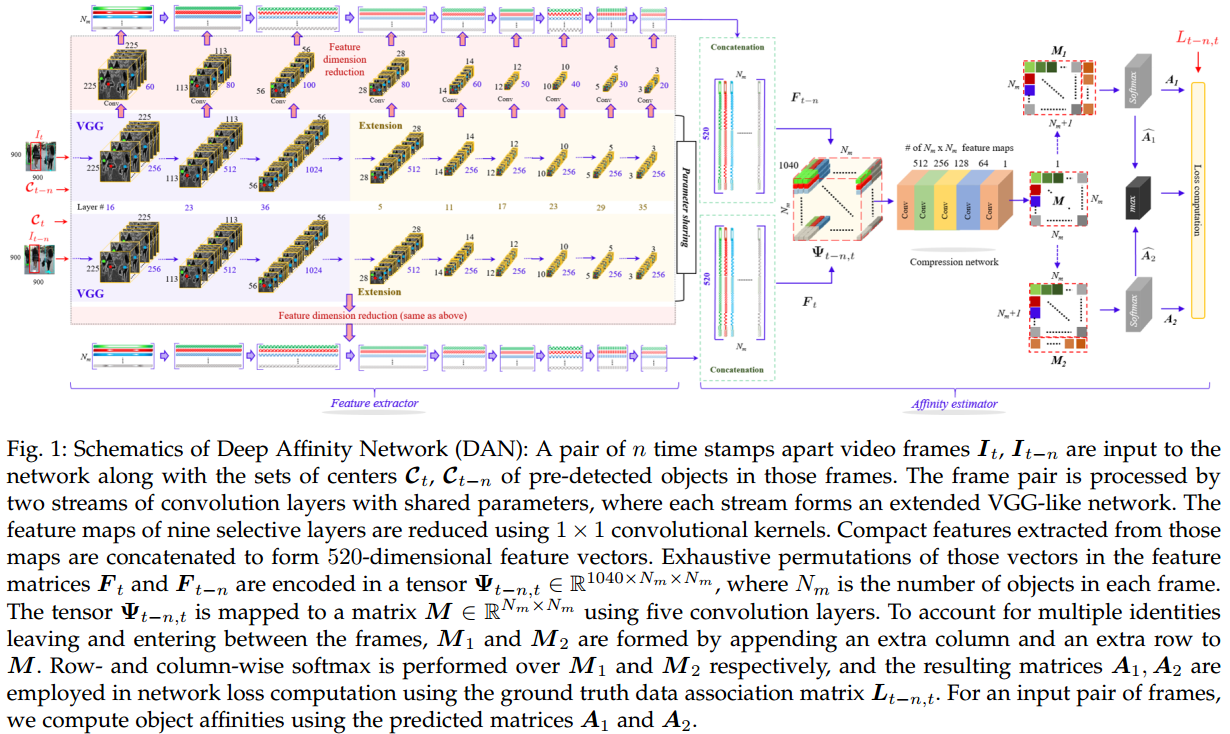
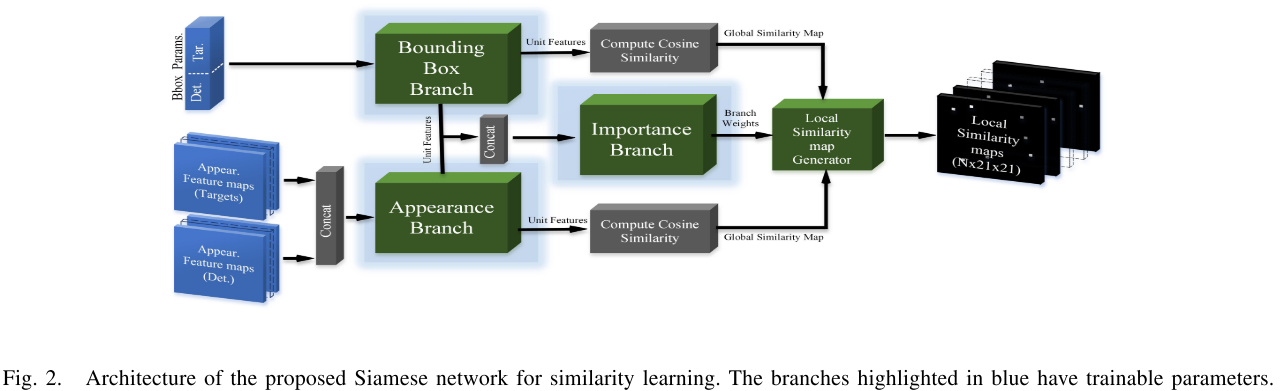
MOT方法一般包含两个步骤:目标检测和数据关联。 目标检测这两年随着深度学习的发展而迅速发展,但是数据关联绝大多数还是采用hand crafted的方式将表观特征,运动信息,空间关系,group关系等进行结合。 这篇文章则是利用深度网络实现端到端的表观特征抽取和数据关联。 Deep Affinity Network(DAN)还实现了轨迹的初始化和终止等操作。在MOT15和MOT17,以及UA-DETRAC数据集上验证了有效性。这篇文章和上篇笔记FANTrack的出发点类似。
目前大多数深度学习的方法主要基于特征的学习, 代价函数的设计,或者如何有效解决复杂的数据关联模型,很少有利用CNN网络端到端解决MOT的。本文提出使用CNN解决data association问题。该方案纯粹利用数据,从3D的角度实现全局的数据关联,同时处理noisy detections以及目标个数变化等问题。
在目标检测领域,深度学习(RCNN系列,YOLO系列,SSD系列)方法取得了很大的成功,但是这些检测方法考虑的仅仅是目标的个体,而没有考虑一帧图像中目标之间的相互影响,所以本文提出一种object relation module ,通过考虑目标集合中个体的交互关系来辅助目标的检测。该模块参数很少能够很方便的嵌入到已有的网络中,提高目标检测性能,另外本文使用该模块实现duplicate removal(NMS实现的功能),从而能够实现网络的end-to-end学习。
尽管目标检测目前已经取得了非常好的性能,但是针对于特定领域内的跟踪方法还可以进一步探讨。本篇文章的研究重点在于更好的检测拥挤场景下的行人。
文章首先分析了拥挤场景下SOTA检测方法存在的问题,然后提出了一种针对于拥挤场景专门设计的回归损失。该损失函数的启发源主要有两点:预测框应该尽可能和目标接近;同时预测框应尽可能地与surrounding目标区分。
实验证明本文提出的损失函数能够在拥挤场景中很大提升SOTA方法的性能。
本文主要收集MOT领域的一些资源, 包括数据集,相关论文以及部分开源代码等。
随着深度学习的推进,基于深度学习的检测器性能提升明显。因此目前的多目标跟踪算法大都基于tracking-by-detection框架。于是MOT任务可以转化为detection+ReID问题。
但相对于与传统的ReID问题,MOT问题会更加复杂。首先,MOT任务中目标轨迹变化频繁, 图像样本库的数量和种类都不固定; 其次,检测结果可能出现新的目标,也可能出现漏检;另外,检测图像并不像行人重识别中的查询图像都是比较准确地检测结果, MOT任务中行人检测往往混杂着误检或者不准确的检测,尤其是相互遮挡产生时。检测行人的不对齐,相互遮挡给目标匹配带来了极大的挑战性。
本文将主要总结一些基于深度网络,希望更好解决MOT任务中ReID子任务的方法。
这篇笔记主要总结了MOT任务中常用的度量指标,其表示的意义和计算方式。
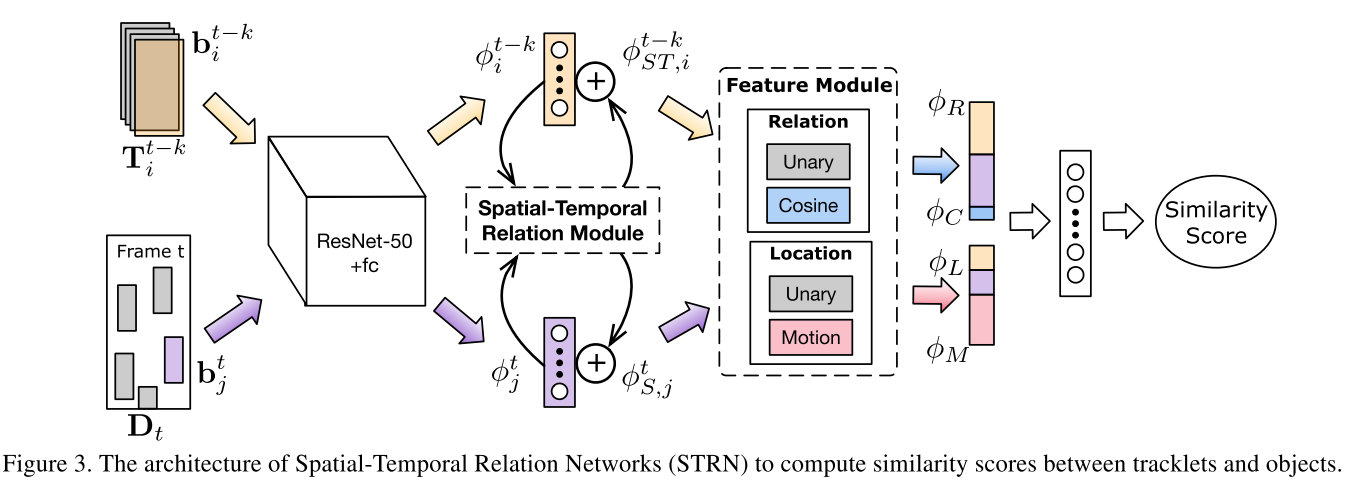
鲁棒的相似度度量是MOT取得较好性能的一个关键。而鲁棒的相似度度量应该能够变现表观、位置、时间和空间信息。由于这些线索差异性较大,不能直接组合在一起,一般的MOT方法会分别使用网络处理这些特征。
本文提出了一种Spatial-Temporal Relation network能够同时encode多种线索,并从时空关系中推理轨迹和检测的匹配关系。该网络能够端到端的训练并在MOT15-17benchmark上都取得了SOTA的性能。