阅读笔记-High-speed tracking with kernelized correlation filters
KCF是一种鉴别式追踪方法,这类方法一般都是在追踪过程中训练一个目标检测器,使用目标检测器去检测下一帧预测位置是否是目标,然后再使用新检测结果去更新训练集进而更新目标检测器。而在训练目标检测器时一般选取目标区域为正样本,目标的周围区域为负样本,当然越靠近目标的区域分为正样本的概率越高。
本篇博文希望借这篇文章阐述KCF的原理和过程,以及存在的一些问题。
KCF是一种鉴别式追踪方法,这类方法一般都是在追踪过程中训练一个目标检测器,使用目标检测器去检测下一帧预测位置是否是目标,然后再使用新检测结果去更新训练集进而更新目标检测器。而在训练目标检测器时一般选取目标区域为正样本,目标的周围区域为负样本,当然越靠近目标的区域分为正样本的概率越高。
本篇博文希望借这篇文章阐述KCF的原理和过程,以及存在的一些问题。
这篇文章主要阐述了多目标跟踪任务的定义,以及多目标跟踪任务与单目标跟踪、身份重识别等任务的关系,并分析了多目标跟踪任务面临的挑战。总结了一些传统的非深度多目标跟踪方法的基本原理。
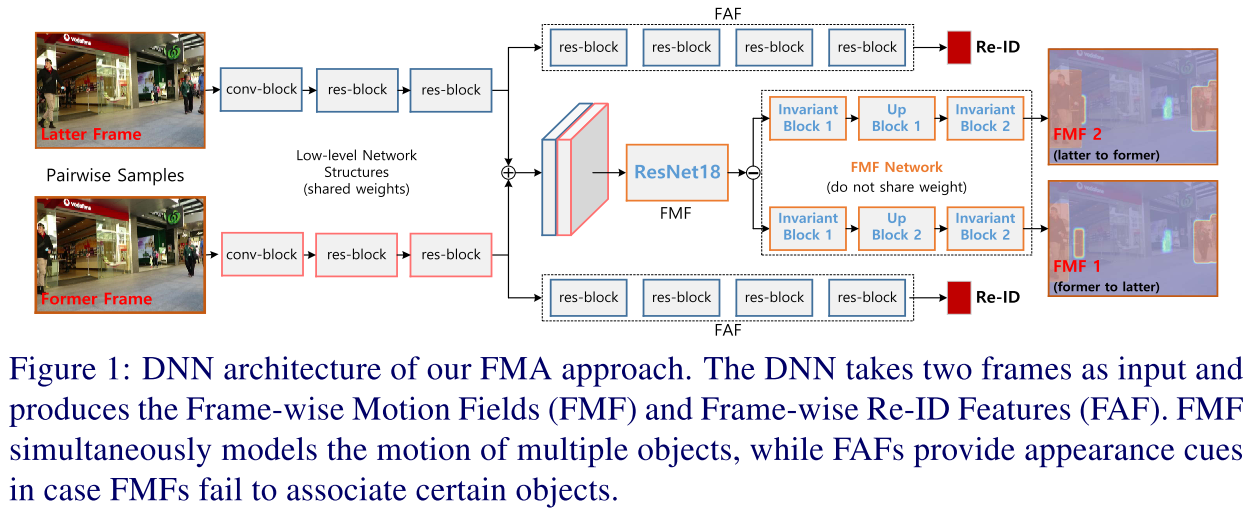
文章同时利用了光流信息和表观信息去解决多目标跟踪任务。对于简单的目标使用Frame-wise Motion Field(FMF)进行跟踪,而对于复杂的目标使用Frame-wise Appearance Features(FAF)进行reid的匹配。 两个模块集成在一起实现端到端的训练,同时也缩短了inference的时间。

这篇文章主要介绍了MOT的2016 benchmark库。相对于MOT15的benchmark而言,MOT16 benchmark视频数据标注更加规范严格,除了标注pedestrian之外,还标注了其他部分类别,同时给出了每个标注的可见度。新的benchmark数据也更加多样。